Contents (Click to skip to that section):
- What is a Trigonometric Function?
- Common Types of Trigonometric Function
- Cosecant Function: csc(x),
- Cosine function: cos(x),
- Cotangent Function: cot(x),
- Sine function: sin(x),
- Secant Function: sec(x),
- Tan Function: tan(x).
- Inverse Trigonometric Function
- Archaic and Unusual Trig Functions
- Common Types of Trigonometric Function
- Derivative of a Trigonometric Function
- Double Angle Formulas
- Integrals of Trig Functions
- Trigonometric Identities
- The Unit Circle
1. What is a Trigonometric Function?
A trigonometric function, also called a circular function, is a function of an angle.
Watch the video for an introduction to trigonometric functions, or read on below:
2. Types of Trigonometric Function
Cosine Function
The cosine function (cos(x)) is a periodic function, which means it repeats itself at regular intervals.
It is widely used in physics and geometry and was actually developed— along with the sine function— in the Medieval period. They were used in the Gupta period of Indian Astronomy, and have an important place in Islamic mathematical documents from the 9th century.
The cosine function abbreviates to cos, which seems to have originated in 16th-century mathematics.
One way of defining the cosine function is by means of a right triangle. Imagine drawing a right triangle with an angle of A. The cosine of A, abbreviated cos A, would be the ratio of the adjacent side to the hypotenuse. In the image below, it would be b/h.
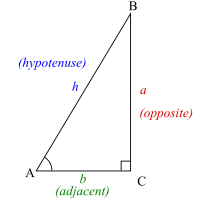
There is only one problem with defining the cosine function by means of a right triangle. It only works for an angle between θ and π/2 radians— between 0 and 90 degrees. There’s another way of defining cosine, however, which allows the angle to be any positive or negative real number.
Defining the Trigonometric Function with a Unit Circle
The image below shows a unit circle with six trigonometric functions marked on it. As you can see, cos θ can be defined as the x coordinate value of point A.
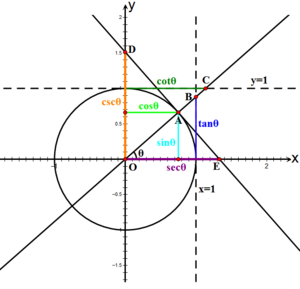
Notice that this definition is the same as our old definition for 0 ≤ θ ≤ π/2.
Also notice that since, for every point P(x,y) on the unit circle x2 + y2 = 1, we can write a Pythagorean identity for the sin and cos as well:
cos2 + sin2 = 1.
Cotangent Function
The cotangent function, cot(x), is a trigonometric function—a function of angles. It is a periodic function, repeating with a period π.
Notation
Although the usual notation is cot(x), the function is sometimes denoted as ctg(x).
As a formula, it can also be written as:
- The inverse of the tangent function: y = 1 / tan(x) or, equivalently,
- As a ratio: y = cos(x) / sin(x),
- As the logarithmic derivative of the sine function: cot(x) = (log(sinx))′.
Where cos(x) is the cosine function and sin(x) is the sine function.
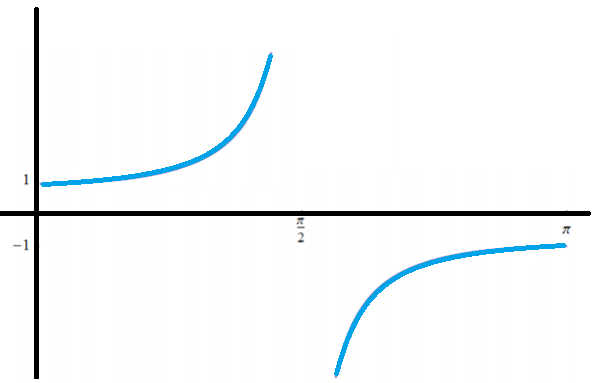
Graph of the Cotangent Function
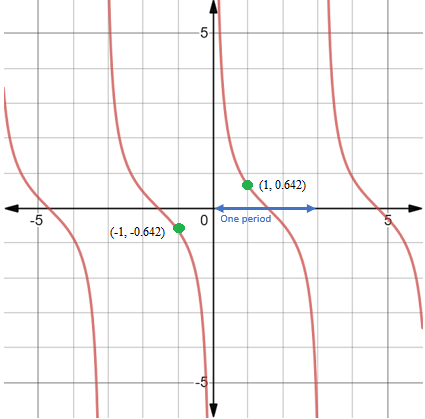
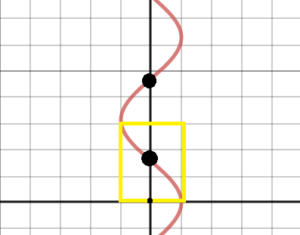
The cotangent function is an odd function. “Odd” here, doesn’t mean “unusual”! It means that the function is symmetrical around the origin. This means that for every point (x, y) on the graph of the function, there is also the point (−x, −y). Shown on the graph, in green, are the symmetrical points (-1, -0.642) and (1, 0.642). The whole graph is made up of a series of symmetrical points like these.
Graph Features: Tangents, Roots, Domain and Range
Some observations about the graph’s vertical tangents, domain and range and roots(zeros):
- The graph has a vertical tangent everywhere sin(x) = 0. They occur at every integer multiple of π.
- The domain of the cotangent function is all real numbers, except for: 0, ±π, ± 2π, ±3π …. At these values, sin(x) = 0, making the denominator in the equation (cos(x)/sin(x)) zero (i.e. division by zero is not allowed, so the function is undefined at these points).
- The range of the cotangent function is the set of all real numbers (-∞, ∞).
- The roots(zeros) of the cotangent function are where the graph crosses the x-axis. They occur where x = 0 (in other words, when the cosine value is zero). The roots on the above graph are at ±π / 2 and ±3π / 2. Another way to state this is that the roots are at every odd half-integer multiples of π.
Haversine Function
The haversine function (“half versed sine“) is a trigonometric function most commonly defined by:
haversin A = sin2(A / 2).
Or, equivalently:
hav A = ½(1 – cos A).
Where:
- “A” is the angle.
- sin = the sine function.
- cos = the cosine function.
What does the Haversine Function Do?
The haversine function calculates a circular distance, d, from two points on the outside of a sphere.
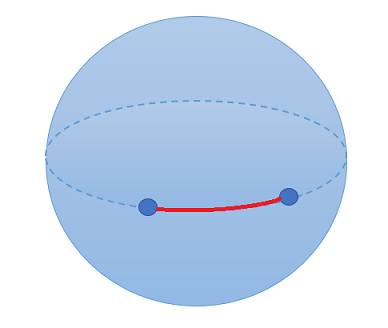
Extending that usage from spherical geometry to real life, it can used to find the distance of a journey (on a globe) using latitude and longitude.
The name “haversine” appears to have come from the words half + versine; The versine function, one of the less common trigonometric functions, is equal to two times the haversine.
Historical Use
The use of the haversine function was historically “…confined to seamen and professional [human] computers” (Hall, 1914). It was used both because of its brevity (a seafarer wanted the quickest calculations) and because of its accuracy (for hundreds of years, the Nautical Almanac was the seafarers bible and was renowned for its great accuracy).
Today, the haversine function has fallen out of favor, replaced by sine and cosine (the haversine can be written in terms of the sine function). The function does crop up every now and again. For example the haversine function in the computer language “R” uses the latitude and longitude for table rows.
Tangent Function
The tangent function is a popular trigonometric function; It is a periodic function, which repeats every π periods.
As a formula, the tangent function is a quotient (division) of the sine and cosine functions:
tan = sin x / cos x
Domain and Range
The tangent function is undefined anywhere the cosine function equals zero, because of the problem with division by zero. Most real numbers work, except for x = π2 + integer multiples of π. Therefore, these values are not in the domain.
In notation, the domain is:
D = {x ∈ ℝ: x ≠ π/2 + nπ for n = 0, ±1, ±2,…}
Where:
- ℝ is the set of real numbers.
- ∈ = “is in [the set of]”.
The tangent function is unbounded, which means that the range goes to infinity (it has vertical tangents at every period). Written in notation, the range is:
R = (-∞, ∞)
Graph of the Tangent Function
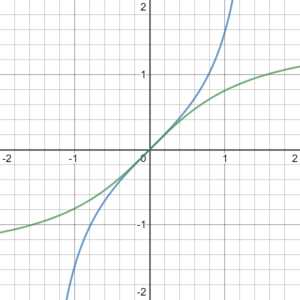
The graph is an odd function, which has nothing to do with odd numbers: “odd” here means it is symmetric around the origin.
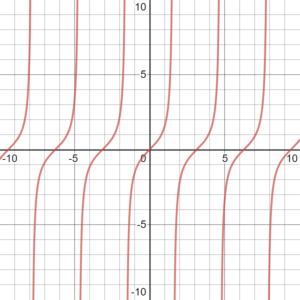
The graph of the tangent function fails the horizontal line test, so that tells us it isn’t a one-to-one function.
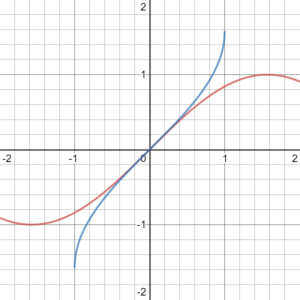
When working with the tangent function in calculus, you’ll usually restrict the domain, which means that you’ll use a boundary for your x-values. The graph below has a domain restricted from -1 to 1.

This graph resembles a “regular” function (instead of a wildly oscillating one), which makes it much easier to work with in calculus. For example, you can calculate an integral with the domain restricted like this, which wouldn’t be possible if the domain included the plethora of vertical asymptotes shown in the larger graph in the above section.
Tan(x) Derivative
The derivative of tan(x) is sec2.
In addition to the above example (and proof), for a second worked example, see : Quotient Rule (Tan x).
What are Inverse Trigonometric Functions?
Inverse trigonometric functions are literally the inverses of the trigonometric functions. You can think of them as opposites; In a way, the two functions “undo” each other.
1. Inverse Sine Function
The inverse sine function (Arcsin), y = arcsin x, is the inverse of the sine function.
However, unlike the sine function, which has a domain of -π / 2 to π / 2, the inverse function has a very tiny domain: from -1 to 1.
Other properties of the inverse sine function:
- The range is -π / 2 to π / 2,
- This is an odd function (which means it is symmetrical around the origin),
- Arcsin x is an increasing function: it travels upwards from left to right.
More info: Arcsin function definition and examples.
2. Inverse Cosine Function
This function, denoted arccos x, is the inverse of the cosine function.
Properties of arccos x:
- The domain is [-1, 1],
- The range is 0 to π,
- This function has no symmetry (it is neither an odd or even function),
- Arccos x is a decreasing function: it travels downwards from left to right.
3. Inverse Tangent Function
The inverse tangent function, arctan x, is the inverse of the tangent function.
Properties of arctan x:
- The domain is [-∞, ∞],
- The range is -π / 2 to π / 2,
- This is an odd function (it is symmetrical around the origin),
- Arccos x is an increasing function, traveling upwards from left to right.
Inverse Cosine Function
The inverse cosine function, denoted arccos x or cos-1x*, is the inverse of the cosine function. In trigonometry, the inverse cosine gives you the angle of the top half of the unit circle.
*Note that the superscript -1 is not an exponent, it’s merely a notation to denote the inverse. Therefore, it’s become common to use arccos instead of sin-1 to avoid confusion with exponents.
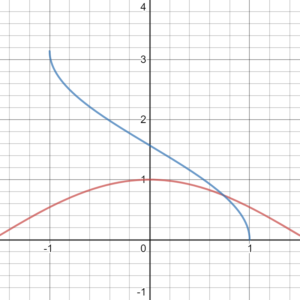
Graph of the Inverse Cosine Function
The graph of the inverse cosine function is just the cosine function reflected over the diagonal line y = x.
Domain and Range
The domain of the inverse cosine function is [-1, to 1]. The range is [0, π].
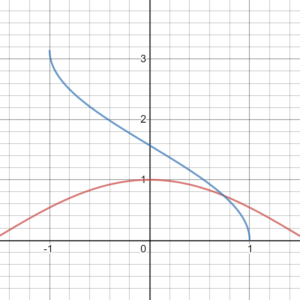
Why is the Domain Restricted to [-1, 1]?
It may seem odd that the inverse is only defined for a very narrow domain. This is because the cosine function is a many-to-one function, which means that more than one input gives the same output. This creates problems with creating inverses where the domain is infinity; it wouldn’t be clear which member of the range maps from which member of the domain.
Essentially, you’ll have an issue where each input maps to multiple outputs. If you remember the definition of a function, this violates the “one unique output” rule; The inverse cosine function would not be a function without this restricted domain.
The graph below shows what the inverse cosine would look like if graphed slightly outside of the allowed range.
References
Graph of cos(x) and cos-1x created with Desmos.com
Oldham, K. et al. (2008). An Atlas of Functions. Springer.
Young, C. (2017). Precalculus. Wiley.
What is the Inverse Secant Function
The inverse secant function (sec-1(x) or arcsec(x)) is the inverse of the restricted secant function.
Domain and Range of the Inverse Secant Function
The domain of the inverse secant function is [∞, -1) ∪ (1, ∞]. In English, that means the domain is made up of two separate parts; A gap exists in the graph between -1 and 1.
If you’re unfamiliar with the notation, the ∪ symbol is the “union“, which just tells you that the two parts together equal the entire domain. The parentheses indicate an open interval and the bracket a closed interval. Together, the mismatched ( and ] are called a Half Closed Interval (or Half Open).
The range of the inverse secant function (shown on the above graph) is from 0 to π. In notation, that’s:
0 ≤ x ≤ π.
Note on the Domain Restriction
Most texts restrict the domain to the above definition, but some authors disagree. The disagreement stems from the fact that the secant function is defined as sec(x) = 1 / cos(x). That function is undefined anywhere division by zero occurs: there is a vertical asymptote at every odd multiple of π / 2 (e.g. π/5, 3π). Therefore, in order to obtain a one-to-one function, it’s necessary to restrict the domain to [0, π/2) ∪ (π/2,π] because only one-to-one functions have inverse functions.
In some texts, you may see the domain of [0, π/2) ∪ [3π/2) instead.
3. Derivative of a Trigonometric Function
Trig functions and their derivatives:
| Trig function | Derivative |
| Sine function: sin(x) | d/dx (sin x) = cos x |
| Cosine function: cos(x) | d/dx (cos x) = – sin x |
| Tan function: tan(x) | d/dx (tan x) = sec2 x |
| Secant function: sec(x) | d/dx (sec x) = sec x tan x |
| Cosecant function: csc(x) | d/dx (csc x) = -csc x cot x |
| Cotangent function: cot(x) | d/dx (cot x) = – csc2 x |
Using the Definition of a Derivative for a Trigonometric Function
You might be asked (especially in beginning calculus) to find the derivative of a trig function using the definition of a derivative instead of a table. When you use the definition of a derivative, you’re actually working on a proof. In other words, if you want to prove that one function is a derivative of another, you’ll nearly always start with the definition of a derivative and end with the derivative of the trigonometric function.
Example Problem
Q. Find the derivative of a trigonometric function (sin x) using the definition of a derivative (in other words, prove that d/dx sin x = cos x:
Step 1: Insert the function sin x into the definition of a derivative:
Step 2: Use the trigonometric identity sin(a + b) = sin a * cos B + cos a * sin B to rewrite the definition from Step 1:
![]()
Step 3: Use algebra to rewrite the formula in Step 2:

![]()
= – sin x* (0) + cos x * (1) = cos x
That’s it!
Tip: You can use the exact same technique to work out a proof for any trigonometric function. Start with the definition of a derivative and identify the trig functions that fit the bill.
Archaic Trigonometric Function: The Versine Function
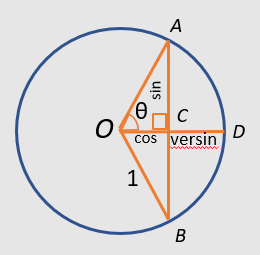
The versine function (or versed sine) is a less common trigonometric function. It is equal to two times the haversine (the name “haversine” appears to have come from the words half + versine).
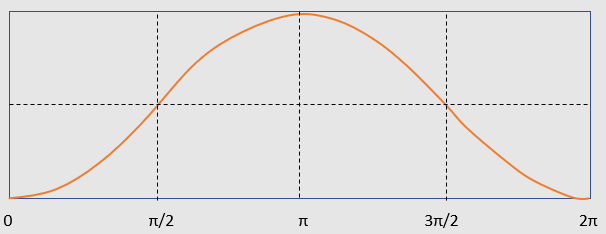
The function has a slope with a smooth transition at the beginning and end of the function (SPIE refers to the function as having a “smooth profile”):
An Obsolete Function
The versine function is pretty much obsolete and is now considered mostly a “historic” function, rarely used except for the occasional mention in the literature. The function was once popular, especially in navigation, for its usefulness in finding certain line segments. However, even those references were mostly related to the more popular haversine function, which is defined in terms of the versine as:
haversine = ½versine(x).
It can also be defined differently (using a little algebra) in terms of the haversine:
vers(z) = 2 hav(z)
Most modern uses of the function relate directly to the haversine, which is used in control theory (the study of the behavior of dynamical systems) and signal processing.
The function has also been defined as:
vers(x) = 1 – cos(x)
Or, the same function with different notation:
cosC(t) = 1 − cos(t)
Double Angle Formulas
Contents:
Double angle formulas are called “double” angle because they involve trigonometric functions of double angles like sin 2x or cos 2x. In other words, when we use the formula, we’re doubling the angle. These formulas allow you to rewrite a double angle expression like sin 2x and cos 2θ into an expression with a single angle. This means that instead of working with a complicated expression, you can transform it to a simpler one. As well as their ability to help us simplify and solve equations, they can verify identities and are needed for some aspects of calculus involving analytic geometry [1].
List of Double Angle Formulas
Sin double angle formula
The double angle formula for sin is:
![]()
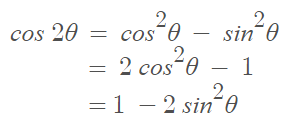
Cos double angle formula
The cosine has three forms of the double angle formula. Each is derived from the Pythagorean theorem, so you only need to know one (the rest can be derived from the formula and the Pythagorean theorem) [2]. That said, one might suit the format of a particular problem than the others. For example, if you have a lot of sines in an equation, use the first form; Choose whichever one results in fewer calculations for you:
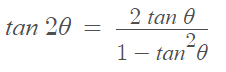
Tan double angle formula
Example
Example question: Factor and simplify the following expression:
cos4θ – sin4θ.
Step 1: Factor the expression:
The question asks us to factor, so let’s do that first to get it into a “double angle formula”- friendly format:
![]()
Step 2: Simplify:
- Use the basic trigonometric identity cos2 x + sin2 x = 1 to replace the left-hand side:

- Use the first cos double angle formula to replace the right-hand side of the formula:

The solution is cos 2θ.
Double Angle Formulas: References
[1] Double Angle Formulas and Half-Angle Formulas. Retrieved July 11, 2021 from: https://www.math.utah.edu/lectures/math1060/2-5PostNotes.pdf
[2] Joyce, D. (1996). Summary of trigonometric identities. Retrieved July 11, 2021 from: https://www2.clarku.edu/faculty/djoyce/trig/identities.html
Integrals of Trigonometric Function
Integrals for the six basic trigonometric functions:
- ∫ sin(x) dx = -cos(x) + C dx
- ∫ cos(x) dx = sin(x) + C dx
- ∫ tan(x) dx = ln |sec(x)| + C dx
- ∫ cot(x) dx = ln |sin(x)| + C dx
- ∫ sec(x) dx = ln |sec(x) + tan(x)| + C dx
- ∫ csc(x) dx = ln |csc(x) – cot(x)| + C dx
Trigonometric Function: Trig Identities
You’re going to need to be familiar with trigonometric identities (or at least know where to look for them). Trigonometry is an entire semester-long class (sometimes two!), so it isn’t possible to put all of the identities here. But some identities show up a lot more frequently in calculus than others. These are the trigonometric identities you’ll use over and over again.
Reciprocal Identities
What this is telling you is that the reciprocal functions sec, csc and cot are the reciprocals of the cosine, sine and tangent functions.
Tangent and Cotangent Identities

These identities are telling you that:
- The tan of a function is a ratio of sine and cosine,
- The cot is the ratio of cos and sin.
Other Trigonometric Identities
The first identity is really just a version of the Pythagorean theorem.
The above trigonometric identities will be used over and over again in your classes. They especially come in handy when it comes to figuring out derivatives or simplifying functions.
For example, if you have a sin2 and a cos2 close to each other in a function, you might be able to cancel them out using a trigonometric identity. If you have a messy looking function with sin/cos/-cos2/sec and other components, look for ways to convert to sin or cos using the above trigonometric identities.
Other Types of Trigonometric Function
There are dozens of other possible types of trigonometric function, like arccosine, arctangent and arcsine, but the reality is you’ll rarely, or never use them. In the five semesters of calc I took in college, I think I used the rarer trigonometric functions only once or twice. You’ll probably never see them on a test (they might be assigned as a “tricky” trigonometric function homework problem). If they are on a test, your instructor will (or should) provide a list of lesser-known trigonometric identities. As long as you know (and can use) the above identities, you should be all set for your class.
Trigonometric Function and the Unit Circle
A unit circle has a radius of 1, centered at the origin (0, 0) of the Cartesian plane. Many trigonometric functions are defined in terms of the unit circle, including the sine function, cosine function and tangent function. That’s why trig functions are sometimes called “circular” functions.
Unit Circle with Radians and Degrees
The following unit circle is labeled with degrees (a complete rotation = 360°) and radians (one rotation = 2π radians), along with their respective coordinates on the Cartesian plane.
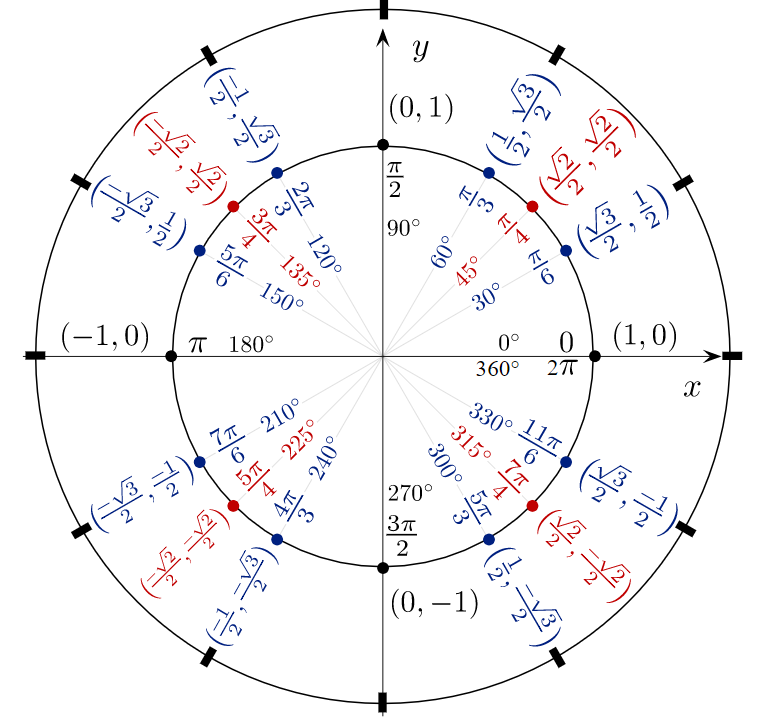
These coordinates are used to find the six common trigonometric values:
- The x-coordinate is the cosine at that angle,
- The y-coordinate is the sine at that angle.
For example, cos(30°) = √3/2 and sin(30° = ½).
Any trigonometric function can be derived from these two ratios.
Trigonometric Function: References
Unit Circle Image: Jim.belk, CC BY-SA 1.0
Desmos graphing calculator.
DeJarnett, N. Tangent Function. Retrieved December 6, 2019 from: https://faculty.math.illinois.edu/~ndejarne/teaching/MA115SP2014/Lecturetopics/LectureOutline14_Tangent_Inverse_Trig.pdf
Deshang, Y. (2016). Trigonometric Functions and Complex Numbers: In Mathematical Olympiad and Competitions. World Scientific Publishing Company.Erdélyi, A.; Magnus, W.; Oberhettinger, F.; and Tricomi, F. G. Higher Transcendental Functions, Vol. 1. New York: Krieger, p. 6, 1981.
Fischetti, T. Mayor, E. & Forte, R. (2017). R: Predictive Analysis. Packt Publishing Ltd.
Gradshteyn, I. S. and Ryzhik, I. M. Tables of Integrals, Series, and Products, 6th ed. San Diego, CA: Academic Press, 2000.
Hall, W. (1914). Modern Navigation: A Text-book of Navigation and Nautical Astronomy Adapted to the Course for Cadets of the Royal Navy. University Tutorial Press.
Korn, G. & Korn, T. (2013). Mathematical Handbook for Scientists and Engineers: Definitions, Theorems, and Formulas for Reference and Review. Courier Corporation.
Larson, R. & Edwards, B. (2017). Calculus. Cengage Learning.
Section 5.5 Inverse Trigonometric Functions and Their Graphs. Retrieved May 4, 2020 from: http://www.math.wustl.edu/~freiwald/131inversetrig.pdf
Maor, E. (2003).The Facts on File Calculus Handbook. Infobase Publishing.
SPIE—The International Society for Optical Engineering, 1995. Smart Structures and Materials: Industrial and commercial applications of smart structures technologies, Volume 2447 – Smart materials
Peña, J. Shape preserving alternatives to the rational Bézier model. Retrieved November 11, 2019 from: Shape preserving alternatives to the rational Bézier model
Raaijmakers, S. (2009). Multinomial language learning. Retrieved November 19, 2019 from: https://pure.uvt.nl/ws/portalfiles/portal/1154994/Proefschrift_Stephan_Raaijmakers_011209.pdf
Wolfram, S. The MATHEMATICA ® Book, Version 4.
Young, C. (2017). Trigonometry. John Wiley & Sons.