Probability Distributions > Generalized Error Distribution / Generalized Normal
What is a Generalized Error Distribution?
The generalized normal distribution, sometimes called the generalized error distribution or Kapetyn distribution, is a symmetric distribution family commonly used in mathematical modeling.
They are particularly useful when errors — the difference between expected and observed values — do not follow a normal distribution. The family includes the normal and Laplace distributions as special cases. The Generalized error distribution is useful when the errors around the mean or in the tails are of special interest. If other deviations from the normal distribution are being studied, other families of distributions can be used. For example, the t-distribution is used if the tails are of interest; the t-distribution approximates the normal distribution as degrees of freedom in the distribution approach infinity. If you have a small sample size you may want to choose the t-distribution as it is more robust to small samples than the generalized normal distribution.
Three parameters define the distribution:
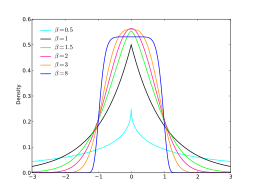
- The mean, μ, which determines the mode (the peak) of the distribution. Like the standard normal distribution, the median and mode are equal to μ.
- The standard deviation, σ, which determines the dispersion.
- A shape parameter, Β. Some authors refer to this as kurtosis, as kurtosis tells you how much data is in the tails (which in turn, tends to give you some information about the peak).
A generalized normal distribution with Β = 1/2 is equal to the normal distribution; if Β = 1 it is equal to the Double Exponential or Laplace distribution. For values of Β that tend toward zero, the distribution starts to look like a uniform distribution.
Classes of the Generalized Error Distribution
The two classes of the Generalized Error Distribution have heavy tails or highly skewed tails. Statisticians R. Vasudeva and J. Vasanthat Kumari describe these classes as:
- Generalized Error Distributions of the first kind (GED-1). This class has heavy tails.
- Generalized Error Distributions of the second kind (GED-2). This class has highly skewed tails.
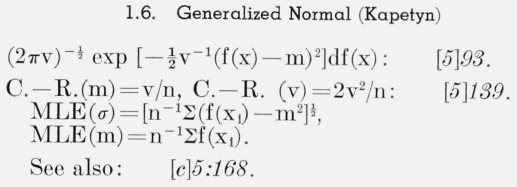
The Kapetyn distribution
The 1962 National Bureau of Standards Report lists the Kapetyn distribution as another name for the generalized normal distribution.
There are sparse references to the Kapetyn distribution as a synonym for the “generalized” normal outside of the NBS report. Kapetyn’s distribution sometimes refers to a specific type of normal distribution; one plotted with a logarithmic horizontal scale (i.e., a log-normal distribution).
According to van der Kruit [3] Kapetyn proposed the following formula for the general skew probability density functions
F(x) = 1 + (1/q) * (d/dx)q * F'(x)
Where F ′ is the derivative dF(x)/dx.
In particular, Kapetyn studied the formula
F(x) = (x + κ)q
and the special case
q = -1,
which is the log-normal distribution.
Kapetyn’s wide system was refuted by Karl Pearson on several grounds [4], including that it was too general and that the lognormal curve used by Kapetyn was of limited skewness in some cases. However, it appears that Pearson may have misunderstood Kapetyn’s theory.
Although “Kapetyn’s distribution” as a name is lost to the annals of history, the formula inspired the works of many authors including Edgeworth [5], Wicksell [6], and Gilbrat [7].
References
- Image: Skbkekas|Wikimedia Commons. CC 3.0.
- Haight, F. (1958). Index to the Distributions of Mathematical Statistics. National Bureau of Standards Report
- van der Kruit, P. (2014). Jacobus Cornelius Kapteyn. Born Investigator of the Heavens. Springer International Publishing.
- Aitchison, J. & Brown, J. (1963). The Lognormal Distribution. Cambridge at the University Press.
- Edgeworth, F. Y. (1898). On the representation of statistics by mathematical formulae. Journal of the Royal Society 1, pp. 670‒700.Google Scholar
- Wicksell, S.D. (1917). On logarithmic correlation with an application to the distribution of ages at first marriage. Medd. Lunds. Atr. Obs. 84.
- Gilbrat, R. (1930). Une loi des repartitions economiqeus: l’effet proportionnel. Bull statist. Gen. Fr. 19, 469.